Bipedal Character Rig
Animation-Ready Production Rig
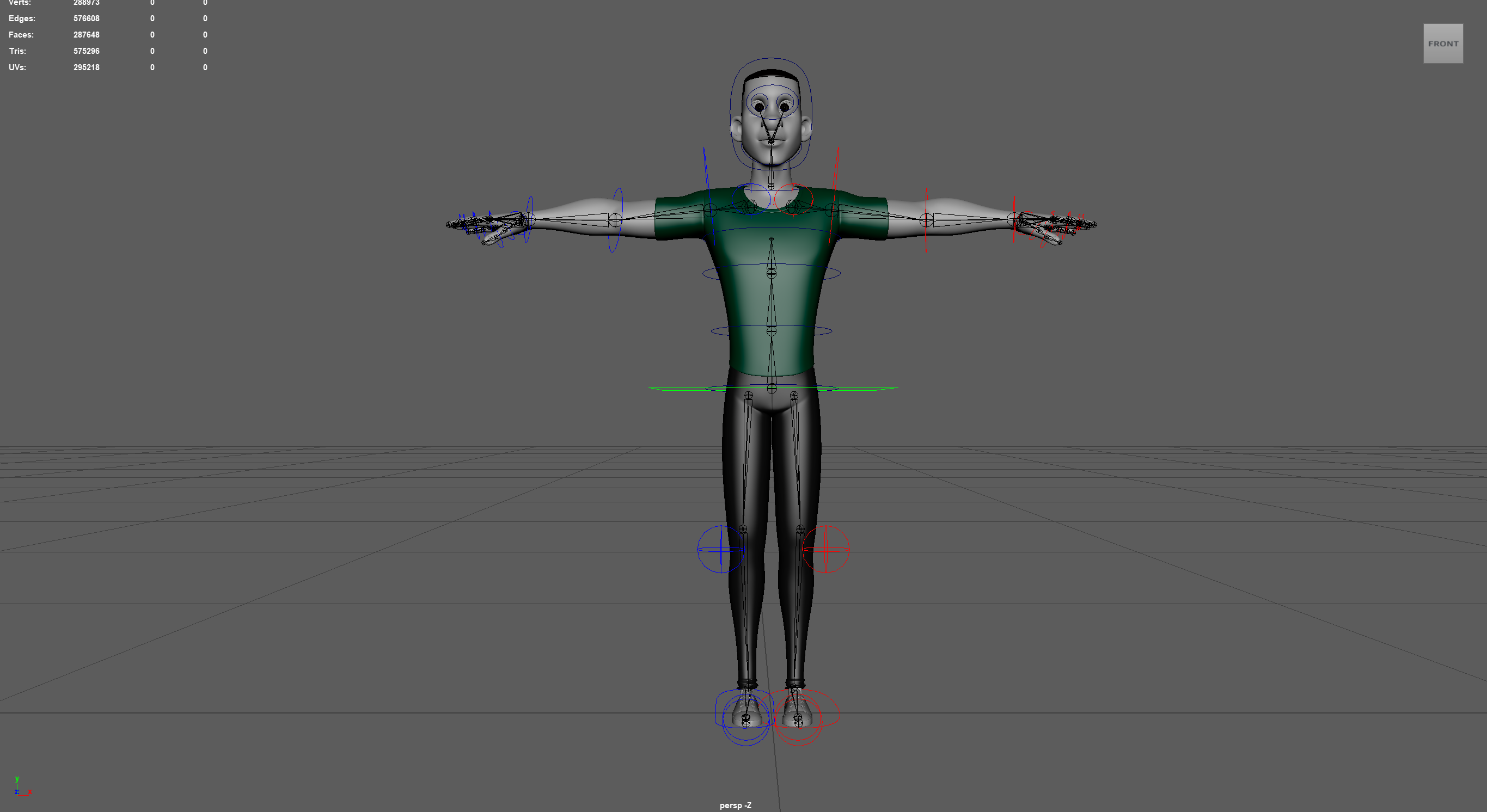
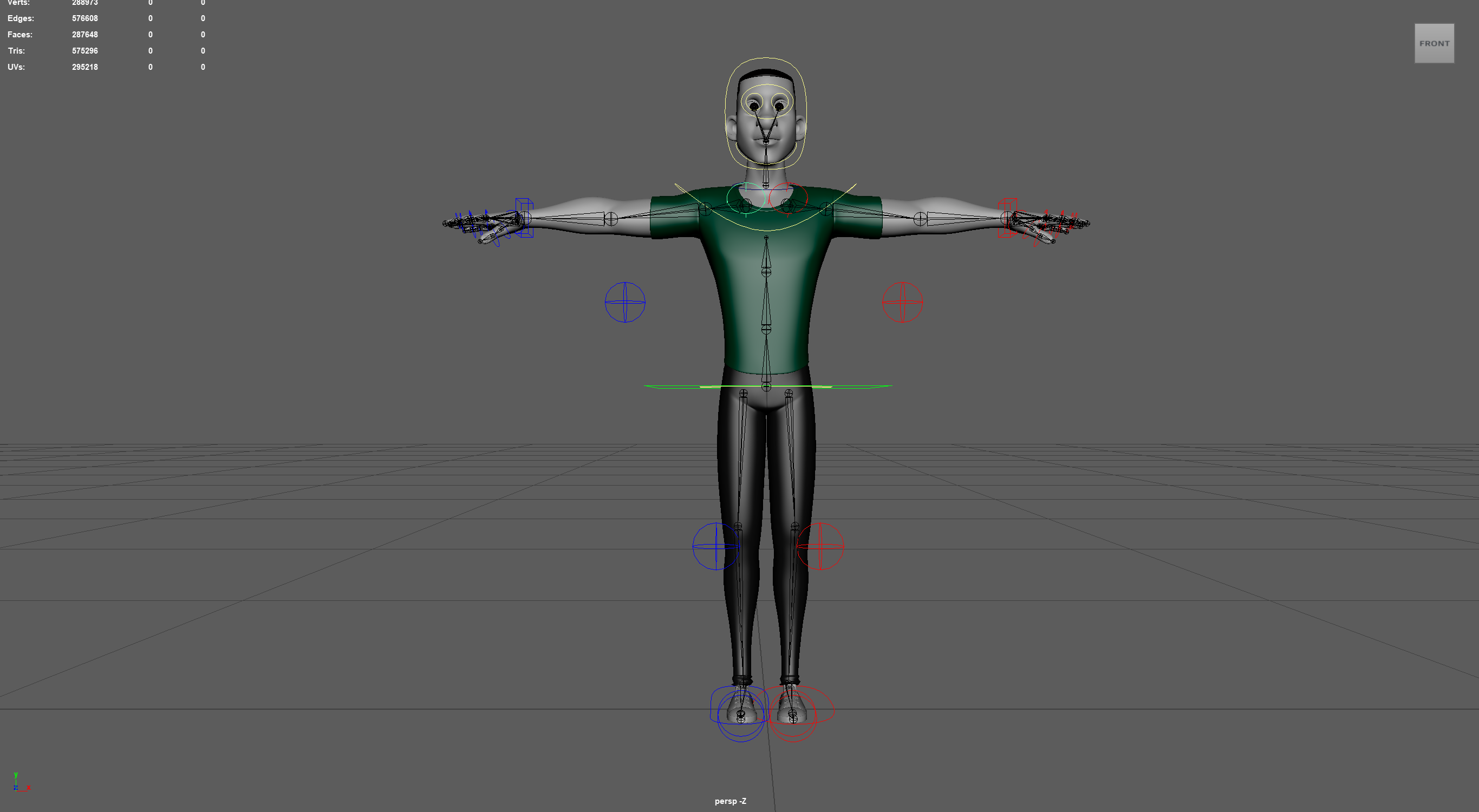
IK Controls View

Joint & Constraint Hierarchy
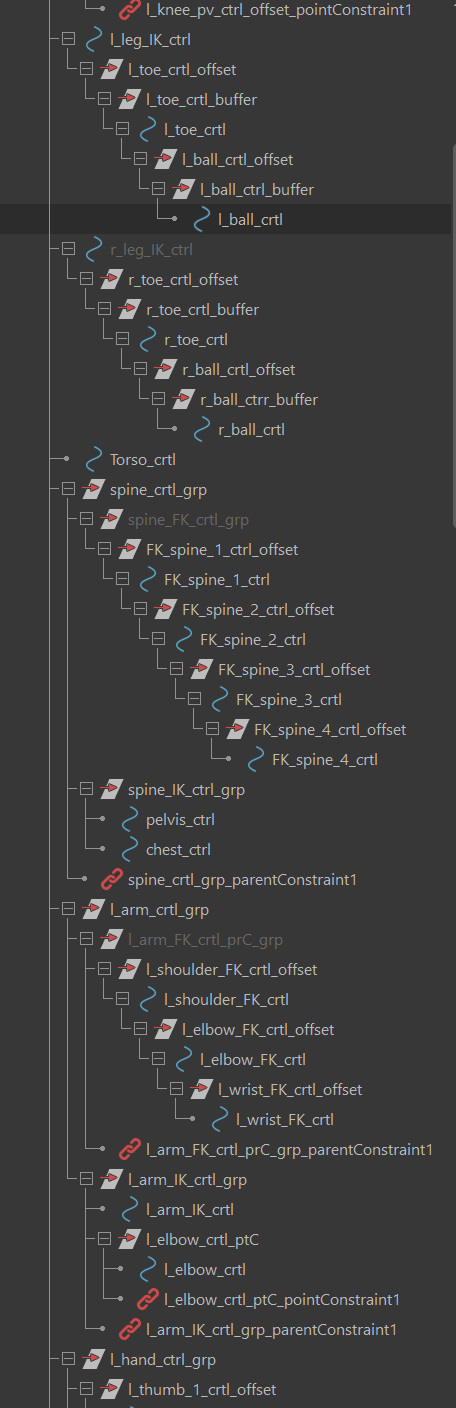
Control Hierarchy
Overview
A custom biped character rig built in Maya designed for animation workflows. The goal was to construct a clean and animator-friendly rig while maintaining a clear underlying structure that separates control, deformation, and driver systems. The rig follows common production rigging practices with IK/FK switching, hierarchical control systems, and organized rig architecture.
Rig Architecture
The rig is structured around three joint layers:
Driver Joints
Core skeleton receiving final transformations from rig controls.
FK and IK Joint Chains
Separate chains drive limb and spine motion, allowing animators to switch between animation styles.
Deformation System
Geometry bound using skin weights for correct deformation during animation.
Leg Rig
Each leg is built with both IK and FK systems for flexible animation control:
- Left and right IK leg joint chains
- Foot joints and reverse foot setup
- IK leg controls
- Pole vector controls for knee direction
The reverse foot setup allows animators to control foot roll and pivot behaviors naturally during animation.
Arm Rig
Arms follow a dual-system structure with separate FK and IK chains:
- Left and right FK arm joint chains
- Left and right IK arm joint chains
- Driver joints controlling deformation
- FK and IK arm controls
Allows switching between precise pose control (FK) and goal-based positioning (IK).
Spine System
Both FK and IK spine setups driven by a central torso control:
- FK spine joints and controls
- IK spine joints and controls
- Driver spine joints
- Torso control with FK/IK switching
Head and Eye System
Separate controls for neck, head, eyes, and jaw:
- Neck joint and control
- Head joint and control
- Eye joints with aim constraints
- Gaze control driving eye direction
The eye system allows both eyes to follow a single gaze target while maintaining correct joint orientation.
Rig Organization
Built with emphasis on clarity and maintainability:
- Properly oriented joint chains
- Consistent naming conventions
- Clearly organized outliner hierarchy
- Logical grouping of rig components
This organization makes the rig easier to debug, extend, and animate.